参考 "相机矩阵"
参考 “世界坐标系旋转到相机坐标系”
主要还是参考这两个
比较我也翻了很多资料 大概就是
p=K[Rt]
K是内参矩阵 (视口大小等)参考 "相机矩阵"
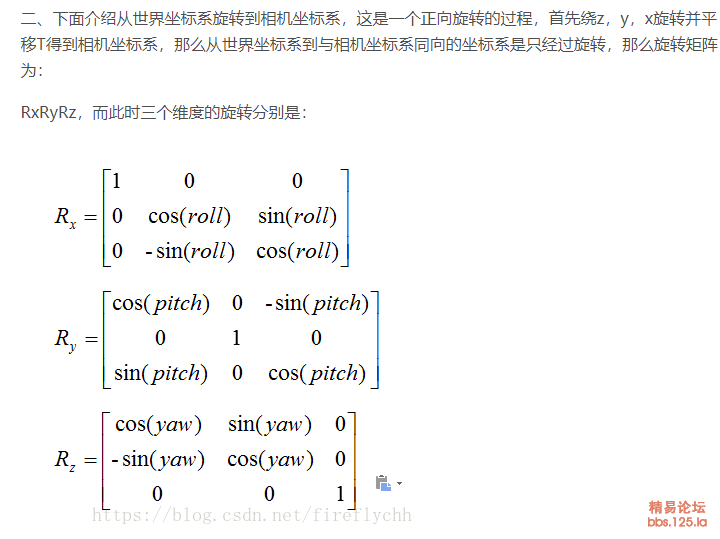
R是旋转矩阵 (欧拉角)参考 “世界坐标系旋转到相机坐标系”
t是相机在世界的位置
算出一个 外参 * 内参 就可以 得到 像素点位置 好像是这样子吧
主要还是 外参
相信有些人 看过 方框 源码吧 读的是 外参
带入 三维坐标 (内参 * 外参 )算出屏幕坐标
以上都是个人理解